随着蔚来世界模型全量推送至“Banyan 榕”、“Cedar 雪松”、“Cedar S 雪松”车型,用户朋友们使用热情很高,智能辅助驾驶的使用率翻了好几倍。在使用的同时,大家也在积极通过各种渠道向我们反映了很多问题。因此,我们推出《蔚来世界模型NWM有问必答》栏目,就大家对蔚来世界模型关心的问题,一一进行解答。
蔚来世界模型和常规的端到端架构
有什么区别?
端到端架构让智能辅助驾驶从人工手写规则变成了靠数据驱动迭代的模型,并且基于模型能自动抽取信息,减少了信息损失,数据利用更加充分。比如在下雨天,明明前方看不太清,但在人工手写规则下,感知模型依然必须要输出具体的距离。而端到端架构可以由模型直接输出执行结果,场景覆盖与性能上都有很大的提升。
不过,如果想要真正实现智能辅助驾驶像人一样开车,仅靠端到端架构是不够的。人类大脑有两个非常核心的能力:一个是空间认知能力,也叫想象重建能力;另一个是时间认知能力,也叫想象推演能力。这两个能力合起来,就构成了人类的时空认知能力,也就是对我们生活的三维空间和一维时间所发生的所有变化和可能性的认知能力。
所以,智能辅助驾驶进化的下一步,就是要具备和人一样的时空认知能力。但端到端架构,并不必然具备这样的能力。而蔚来世界模型,既要去建立时空认知能力,而且还具备在想象的平行世界里规划轨迹的能力。
相比常规的端到端架构,蔚来世界模型有三个主要优势:
在空间理解上,通过生成式模型重构传感器输入,更加泛化地抽取信息;
在时间理解上,通过自回归模型,自动建模长时序环境;
在海量数据使用上,通过自监督学习的方式,无需人工标注。

这样的模型对于算力的要求也会更高。蔚来在“Banyan 榕”系统搭载的4×Orin-X芯片,提供了充足的算力储备为用户提供长期的领先体验。而在“Cedar 雪松”系统上搭载的“神玑 NX9031”芯片,更是今天全球智能辅助驾驶芯片的算力天花板,为蔚来世界模型原生设计,将来会有更高的上限。
蔚来世界模型还需要群体智能吗?
在大规模的人工智能应用中,真实的数据并不容易获取,而智能辅助驾驶是这些应用中数据闭环最为成熟的,也是最有可能率先形成大规模安全性应用落地的。在蔚来“Banyan 榕”系统的4×Orin-X芯片中,有一颗是群体智能专用芯片,可以将智能辅助驾驶待验证的新版本分发到数十万量级的量产车上,去对比人类驾驶的状态,或是对比之前稳定版本的状态,从而针对性提升新算法的适用性,大大加快智能辅助驾驶的总体进化速度,确保用户的智能辅助驾驶体验更好。
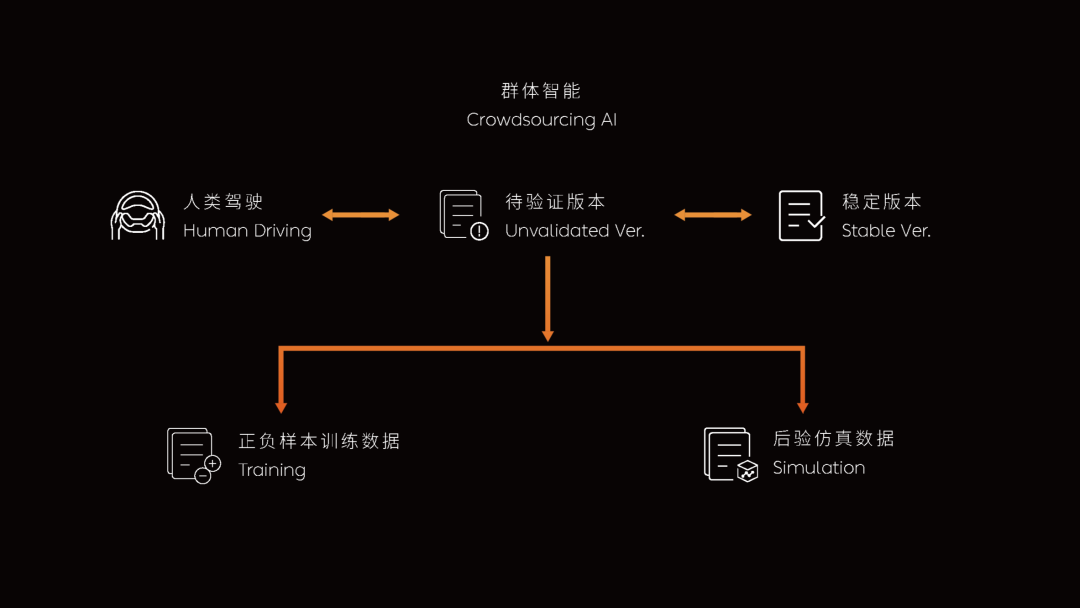
而在更新蔚来世界模型架构后,对数据的需求量变得更大,群体智能依然具备不可或缺的重要性,在“神玑 NX9031”芯片中也设计了专门用于群体智能的模块。除了群体智能,蔚来世界模型在数据层面的另一个杀手锏是生成式仿真,基于真实世界的视频去重建一个虚拟的、可以任意编辑的世界,从而将真实世界的结果和想象出的结果做验证、对比和学习,在千万个变化的世界里去共同训练模型,让蔚来世界模型想象的结果更真、驾驶输出更好。
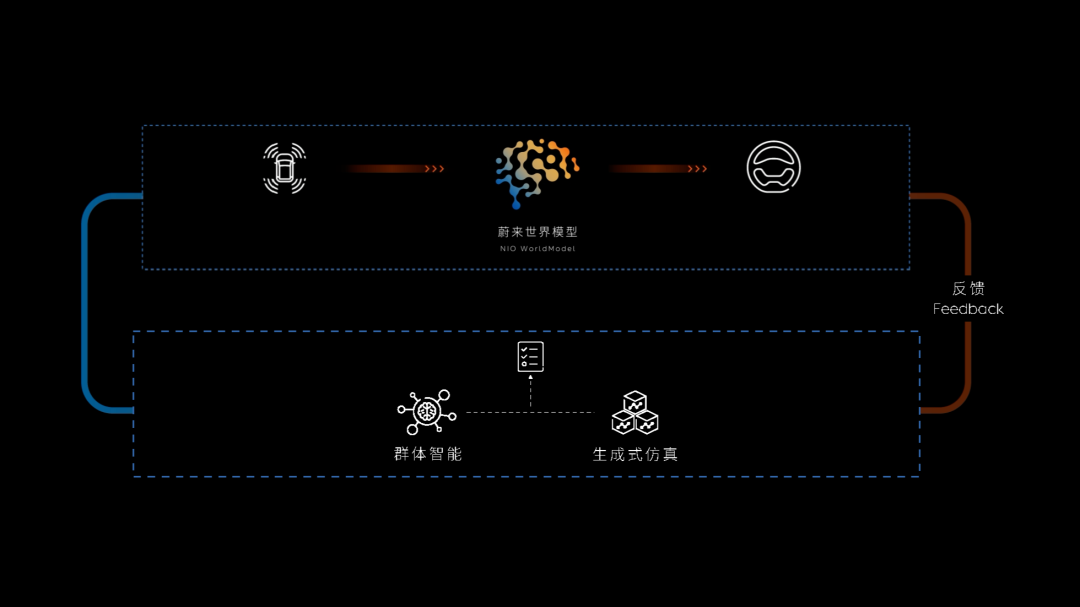
群体智能和生成式仿真,共同满足蔚来世界模型庞大的数据需求。
为什么蔚来世界模型
在小路、人车混行等
复杂场景中的表现格外出色?
蔚来世界模型具备很强的认知、理解、推理能力,尤其是空间理解能力和长时序的建模能力突出。而小路通行空间狭窄,行人、二轮车、三轮车运动相对无序,各类障碍物摆放无规则,特别考验智能辅助驾驶系统的动态博弈能力和预测能力,而这些恰恰是蔚来世界模型基础能力的体现。因此,蔚来世界模型在小路、窄路、人车混行道路上的表现格外出色。






文章原文
